4/17/2022
Happy Easter!
Although work has slowed a bit progress continues, and here is a synopsis of recent activity:
1- The Trammel engine got a new (more powerful) motor with speed controller.
2- Trammel displayed thrust only during acceleration with new motor.
2- LOLA or Linear Oscillation Linear Thrust experiments began.
3- Linear component analysis showed it is useless without proper energy storage and release.
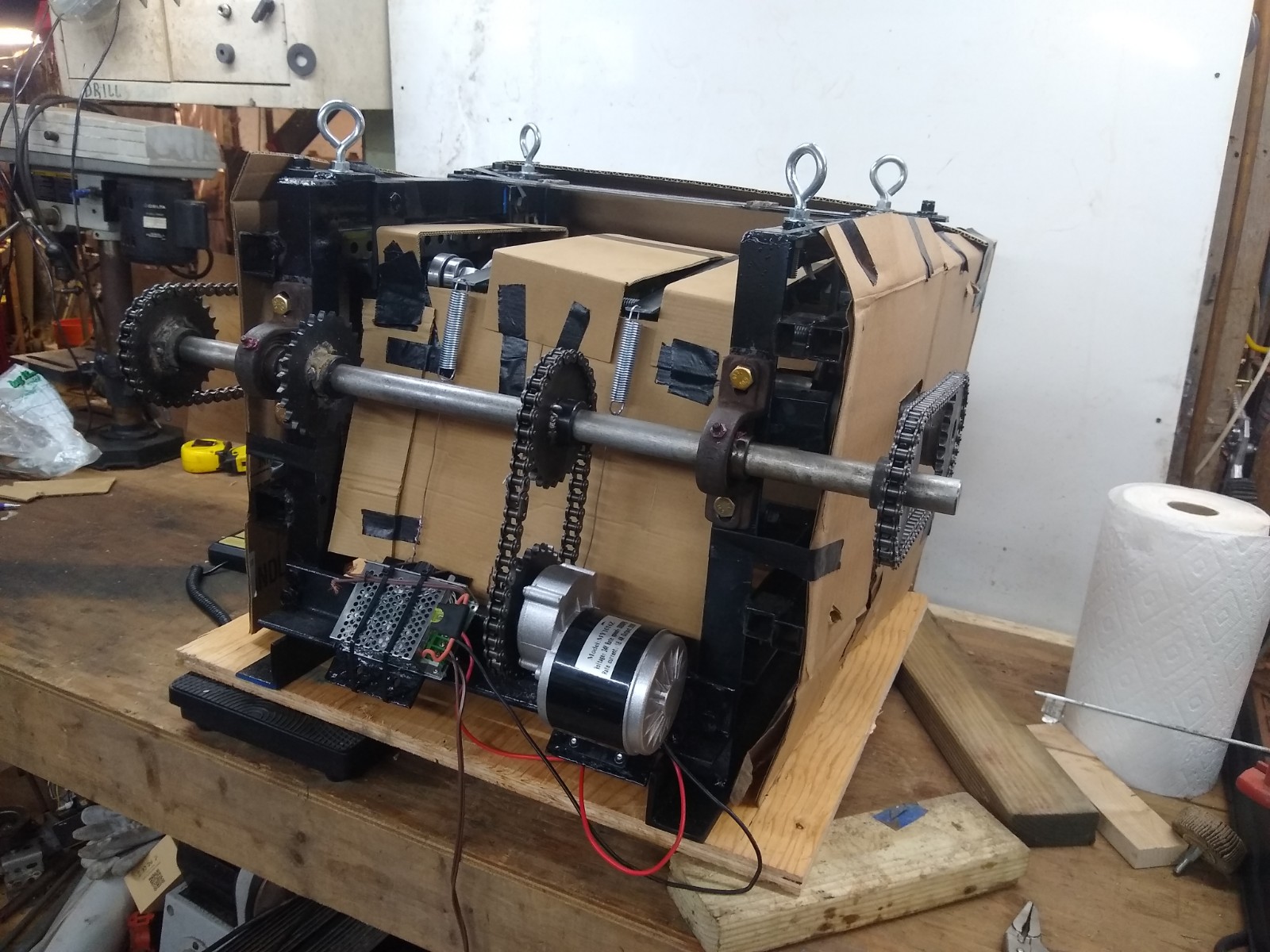
4- LOLA v.1 is a linear drive experiment where dual linear components rotate parallel with the axle.
5- LOLA v.2 is a linear drive experiment where a single linear component oscillates which also builds and releases energy by building spring tension and releasing it as the mechanism rotates “over center”.
6- Both LOLA experiments allowed some better understanding of the movement of energy between the mechanism and “etheric inertia” which creates propulsion.
7- The term “etheric inertia” was coined by me. It is the inertia which is not part of the machinery itself, but instead is the inertia which is manipulated and is observed as the movement of the drive and is usually expressed with terminology such as “inertial thrust”. Where thrust would be the verb and/or adverb, “etheric inertia” or EI would be the noun and/or pronoun defining the “environmental force” not just the action of that environmental force.
Note: Inertial Doppler was also coined by me as the observable increase in thrust which happens as the vehicle using the inertial thrust engines move faster, mimicking a type of Doppler effect.
8- During recent APEC conferences which included presentations by Ross Small, myself, and others, it has been mentioned that the RBI machine of Ross’ an my PIE X/Trammel Engine are derived from the work of Mike Marsden who was the inventor of the Mac-Quan. Mr. Marsden dropped out of sight before the unveiling of his second-generation Mac-Quan which was set to occur at the annual Wright brother’s celebration in Kitty Hawk, NC around 2011 or 2012. The Mac-Quan has long been the “gold standard” that all inertial propulsion developers have hoped to duplicate. Mr. Marsden was rumored to have passed away, but I believe he has retired and is now living in relative seclusion somewhere in North America, no longer having anything to do with the technology. The reason(s) is/are up for speculation as he never actually said why he closed up all of his businesses in Texas and dropped out of sight. Even his old web site (www.earthport1.net) is missing from resources such as the Wayback Machine.
I have been fortunate enough to have made the acquaintance of some people who knew Mike Marsden firsthand. Although he did not “give away” the full secret of the internal mechanisms, he did guide these people toward the correct answers. Their information and engineering skills combined with my mechanical background and “get it done” work ethic has produced the PIE X or Trammel Engine as I like to call it.
I have agreed to not divulge the inner workings publicly in return for the engineering data. Hopefully in time the design will be perfected and surpassed at which point it will be part of textbooks around the world.
If anyone here has ever been in contact with Mike Marsden, knows anyone who has been in contact with him, or knows anything about this technology, I would love to hear from you. I will gladly keep any information anonymous and secure and not share anything without your express approval. Email me at stclairtech@stclairtech.tech.
Notation:
Testing rotation speed with a sensor and lab scope setup is now showing that the assembly built to eliminate backfire is keeping the internal speed change reaction times to be too slow to provide proper output thrust. Internal components will now be modified, probably using a pair of timing chains instead of cam-like lever assemblies.
Personal note: I truly long for the day where this is fully functional, and we can have open discussions regarding the design and inner workings of the Trammel Engine. Maybe I should be creating a Power Point presentation as I go…