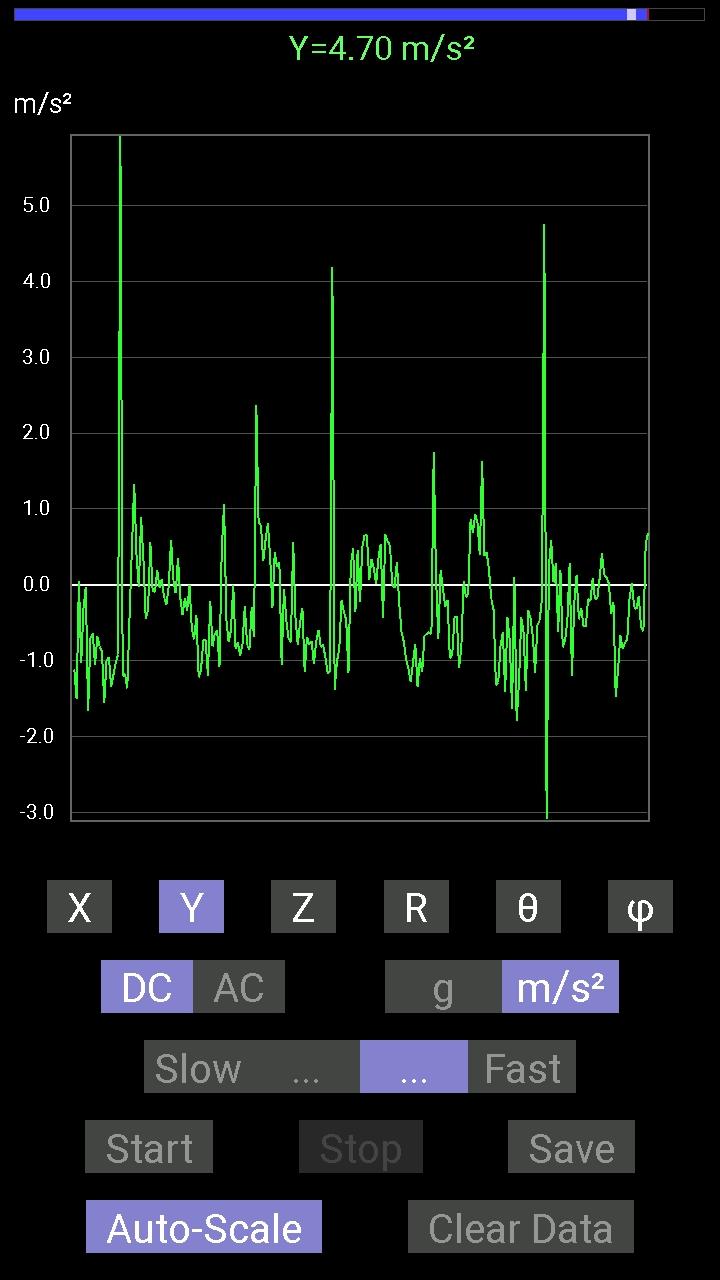
The PIE 4.8 CCW wheel is pretty well set. I have attempted to get some force tests done with a force meter, the output readings were very unstable at best. I was however able to get some slightly better readings with an accelerometer.
The photos are screenshots from an accelerometer app on an android phone. The waveform or trace is below the “0” when pulling forward. It is obvious that there is a more stable pull during each pulse forward, and disorganized spikes in the reversion direction. Keep in mind that it will show a small reverse pull between forward pulses just because the chassis slows slightly between propulsive pulses.

On Saturday 5/1/2021 I had the honor of being asked (at the very last minute) to speak about the PIE systems on the APEC conference Zoom meeting. My part was near the end but just before open discussion at 4:51:28 and even though I did not have anything prepared it was still a lot of fun. APEC is Advanced Propulsion Engineering Conference and it is hosted by Tim Ventura of American Antigravity (https://www.americanantigravity.com). The full video of that conference is here:
During the conference we talked about the PIE systems, discussed theory, and talked about the near-future testing. We also discussed a phenomena that has been showing up in PIE experiments since the first on-road tests of the PIE 1.0. The phenomenon is that of increasing thrust when the entire unit is in motion. The faster the test vehicle moved the more forward thrust was experienced with each pulse. This has also been experienced and proven in the lab, so it has moved from a possibility into a fully testable repeating phenomenon. For lack of any better analogous terminology I started calling this the “Inertial Doppler Effect”. As a friend and colleague was maintaining that he thought the PIEs are still some form of “stick-slip” drive which depend on friction to operate (fully disproven in the lab) and it occurred to me that maybe he is wrong and right at the same time.
This is my current understanding of this phenomenon. I know that my “loose definition” of Doppler is not 100% correct when comparing a mechanical system to an EM wave form. This is a copy and paste of my reply to the idea of the PIE being a stick-slip drive:
My analogy of inertial Doppler is a “still forming” theorem, bit it currently a spacial/mass/inertial interaction which is proving itself in reality. Here are some cold, hard, facts… Doppler effect exists because the “center of mass” of the energy wave is moving and the energy is emanating from that “center of mass” making the wave have more “force” in the forward moving direction (Overly Simplified). Sooooo… The PIE (or I venture to say “any”) inertial drive will exhibit the Doppler effect, and if that is so (it is IMO) then all inertial drives ABSOLUTELY MUST have more mass in the overall structure than the masses being displaced (moved, oscillated, etc. also) in order to have directed thrust (linear motion). If the mass of the structure were less there would only be massive vibration (oscillation) – example: if a 2 moving mass (weights) structure weighed 5kg and the masses weighed 2.5kg each there would be a net linear propulsion of little more than zero even if the propulsive force was 2X higher than reversion force, but if the structure weighed 10kg there would be more mass “in motion” than there is “reverting”… So, ideally the mass of the structure should be 1 to 2X of the reversion force!
If I didn’t ramble too incoherently, and you are following my train of thought above, this means that ANY inertial drive which succumbs to this theory is a “stick-slip” drive but it is the inertia of the structure’s mass that it’s “sticking” to (pushing against). It also explains the Doppler effect because if it is “pushing” against inertia itself, that inertia is stronger as the structure moves!
I may have sprained a brain cell or two trying to put this theorem into words!!!
Till next time….