PIETECH 4.7 and “PIE X”:
It has been a while since my last post, or video so here is an update:
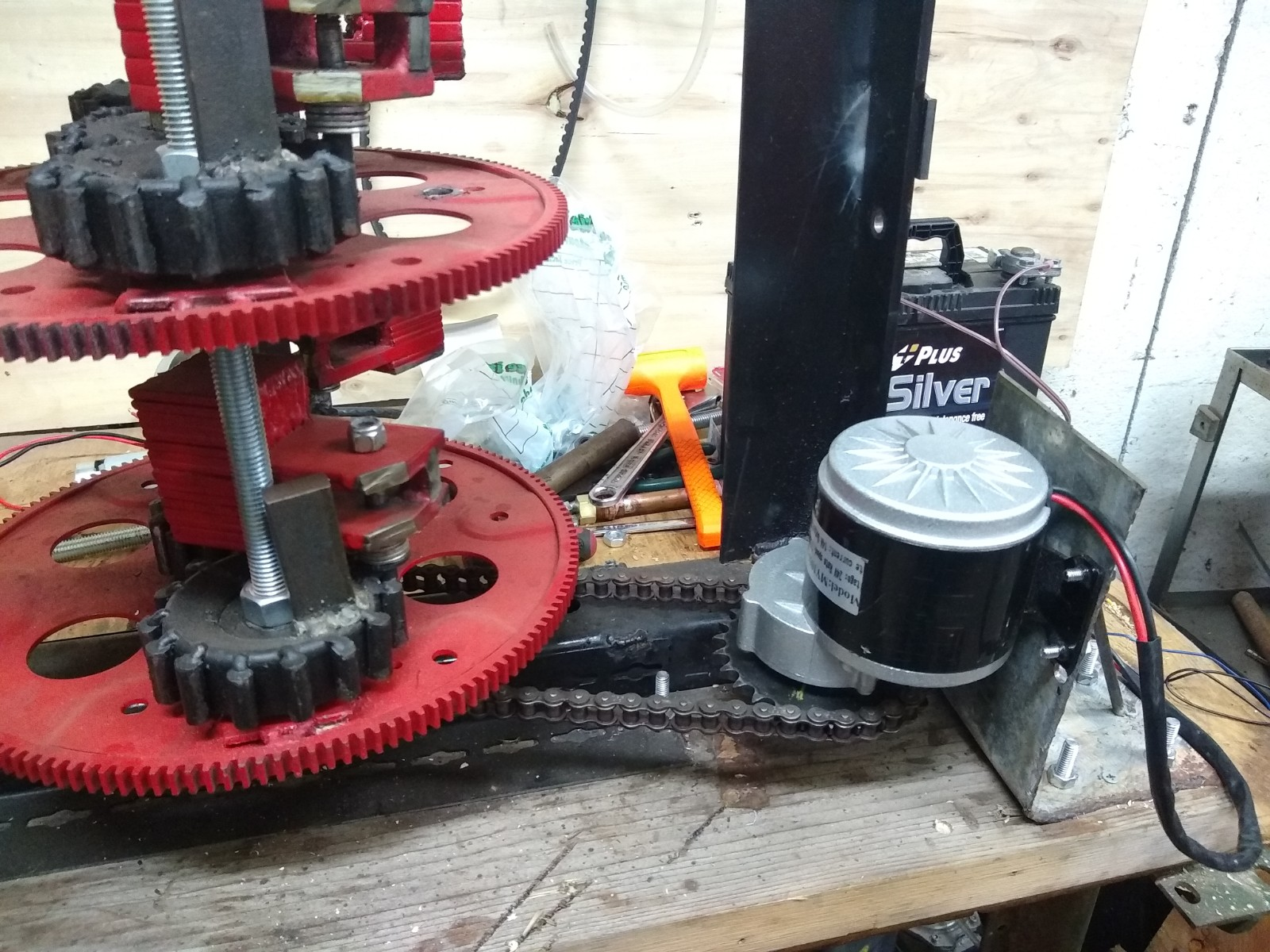
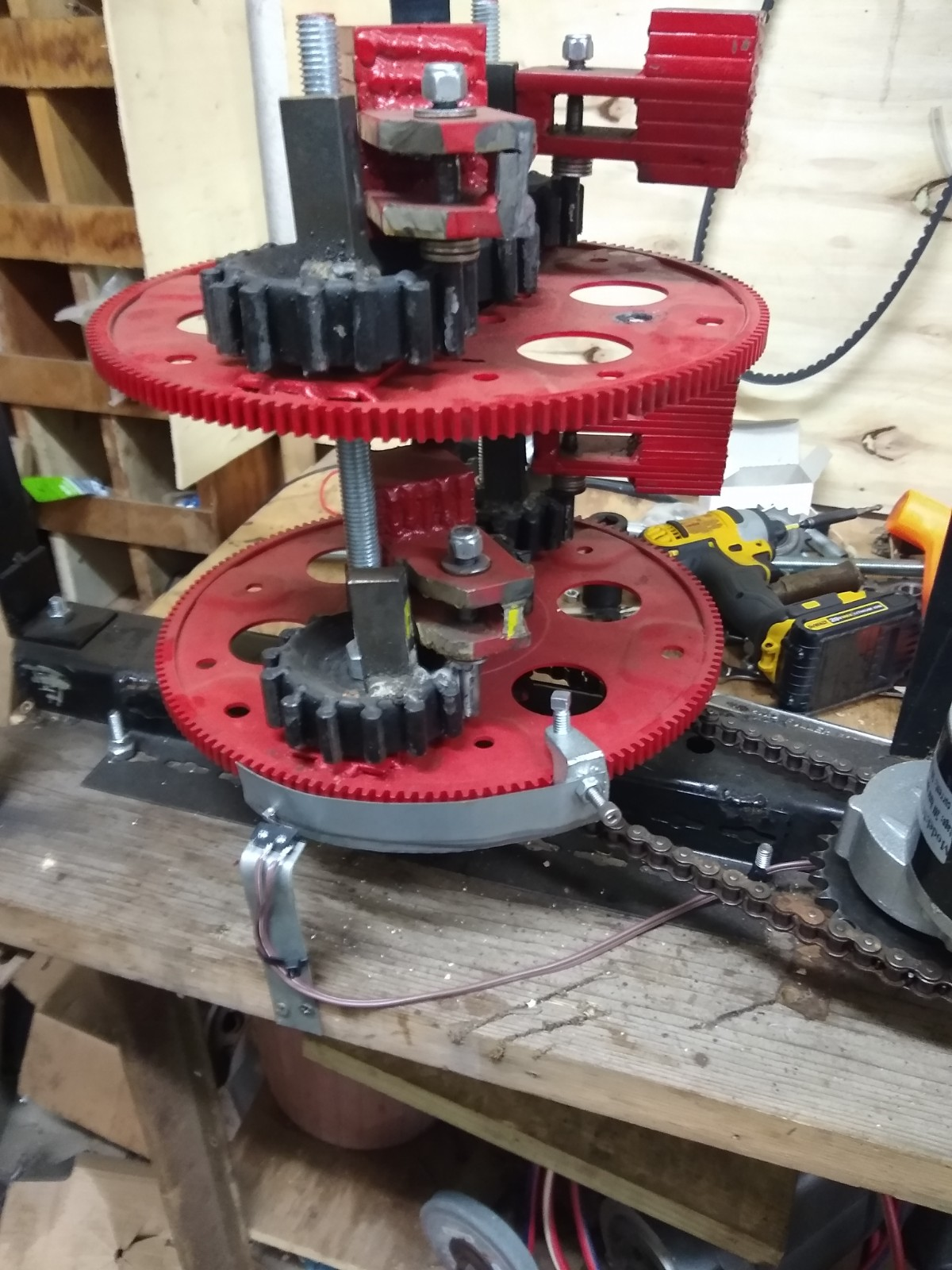
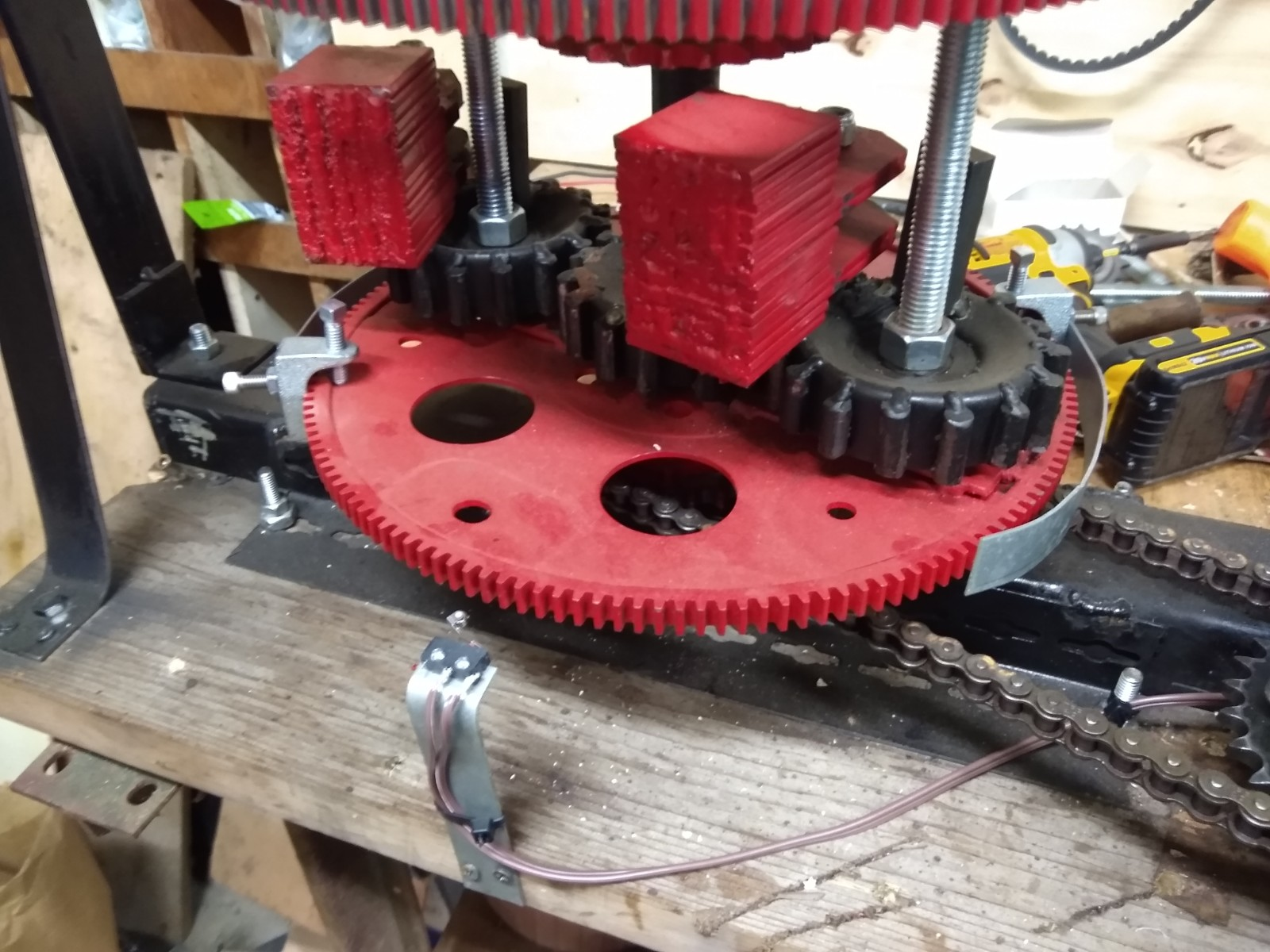
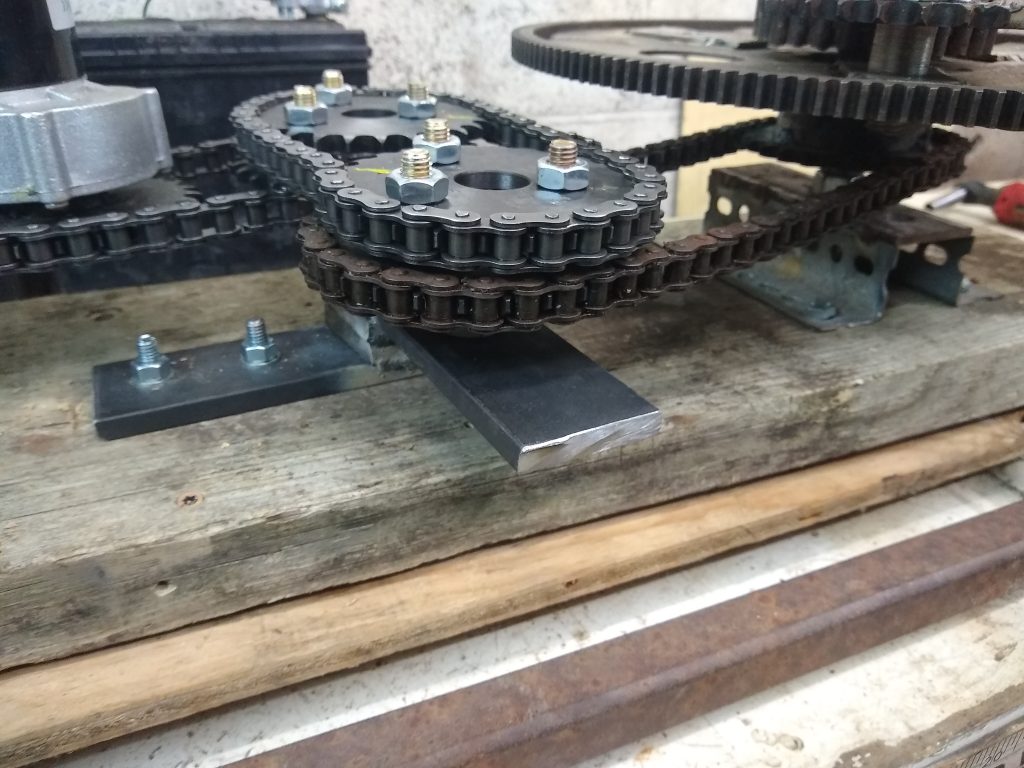
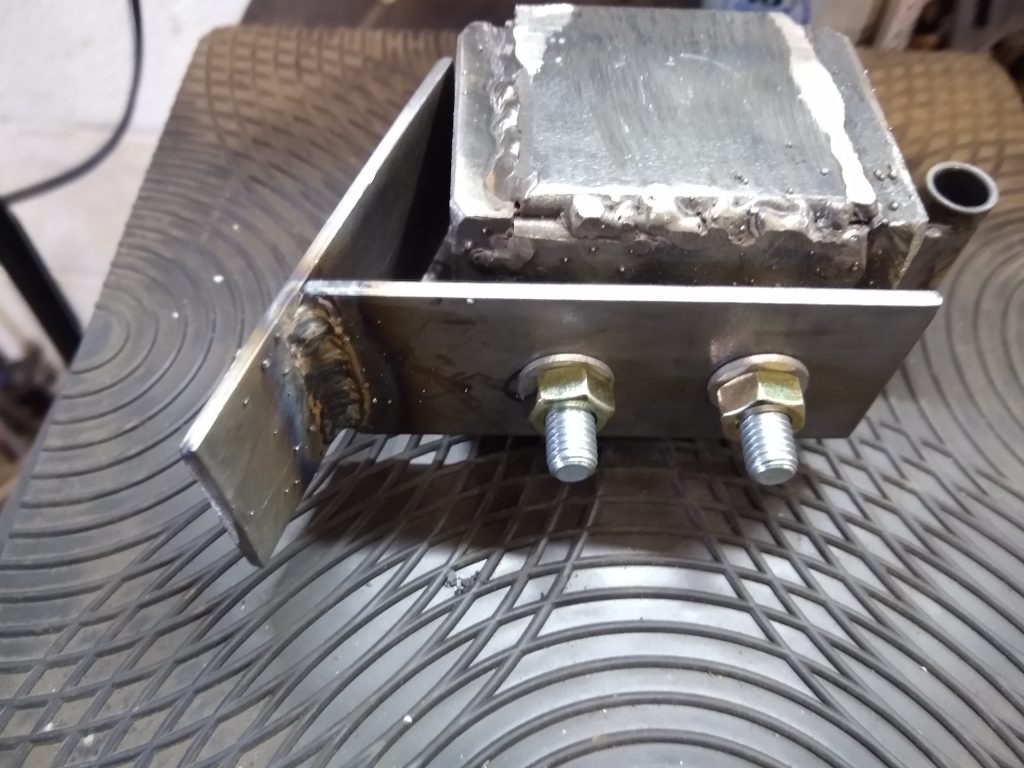
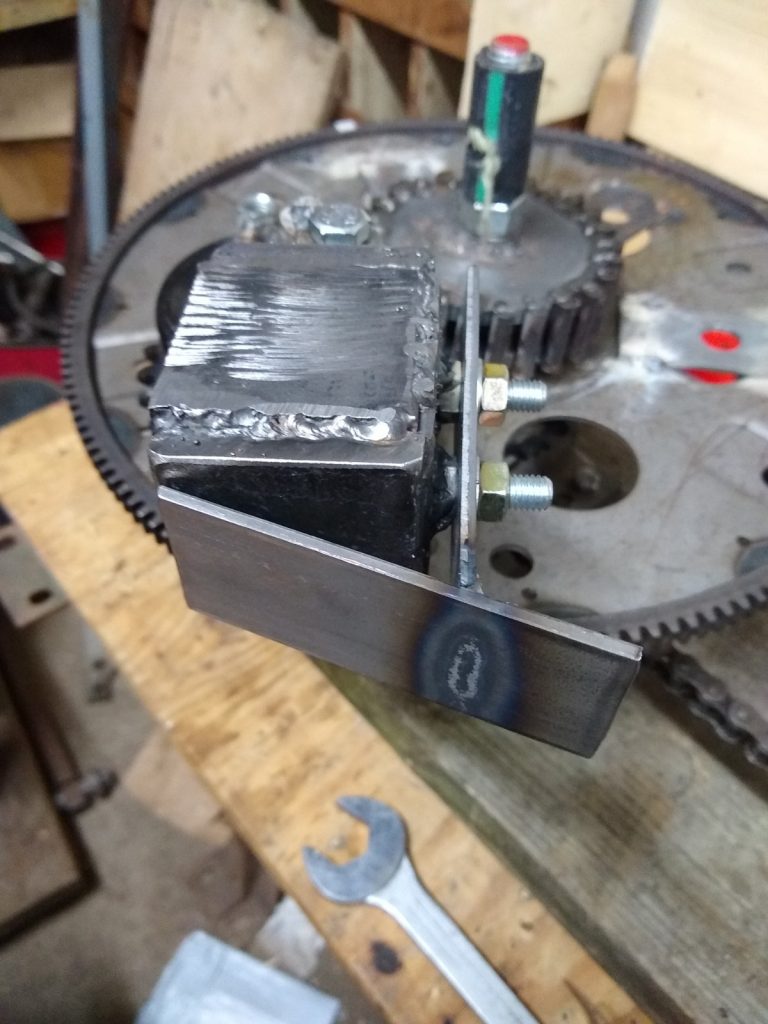
The PIE 4.7 second half (CCW wheel) is progressing, although somewhat slower than I would prefer as life’s circumstances have presented certain obstacles to its advancement. The first “dead blow” weight for it is ready to install, and another is in process.
I always said it is not a good idea to have more than one project going at a time, yet that is exactly what I am doing…
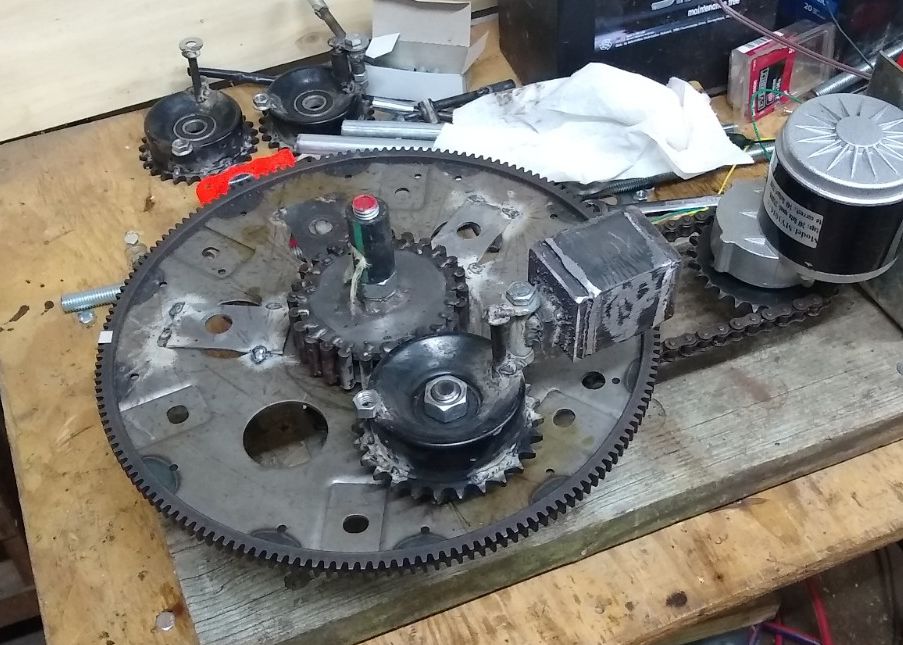
After communicating at length with other builders, I have split my time between the PIE 4.7 and a new design, the “PIE X”. It has some radically different internal components and will look a bit different but it is still what I would call a Pulsed Inertial Engine, so right now it is known as the “PIE X”.
This design has originated from other people so I will need their permission to “open source” any of that information! I require their permission to share or publish the information leading up to the PIE X without the consent of those who have been kind enough to share the basic design information with me!
If the PIE X is as feasible as predicted and becomes something worth pursuing more information may be provided (with permission), and if it falls short, I will provide thoughts regarding that failure (still, with permission only).
Note: The PIE X is quite a bit more expensive and much more complex to build and fabricate the components for, so it may not be something the casual hobbyist would feel comfortable with, at least not until there is a working prototype to prove the principals.
Those who know me and those who have followed along with my PIE/PIETECH projects know that I do not randomly spout “theory”. I only present factual information so until I have an experimental prototype, I would not request permission to elaborate any technical information. I only mention the PIE X as an ongoing project because it does slow the PIE 4.7 project and has pushed back the timetable to begin full testing. I am hoping to be performing “on road” testing of the PIE 4.7 by early June which gives me about 8 weeks.
I hope to be posting photos and videos VERY soon, so right now I need to go get busy, I have a PIE 4.7 to finish building and a PIE X to get underway!