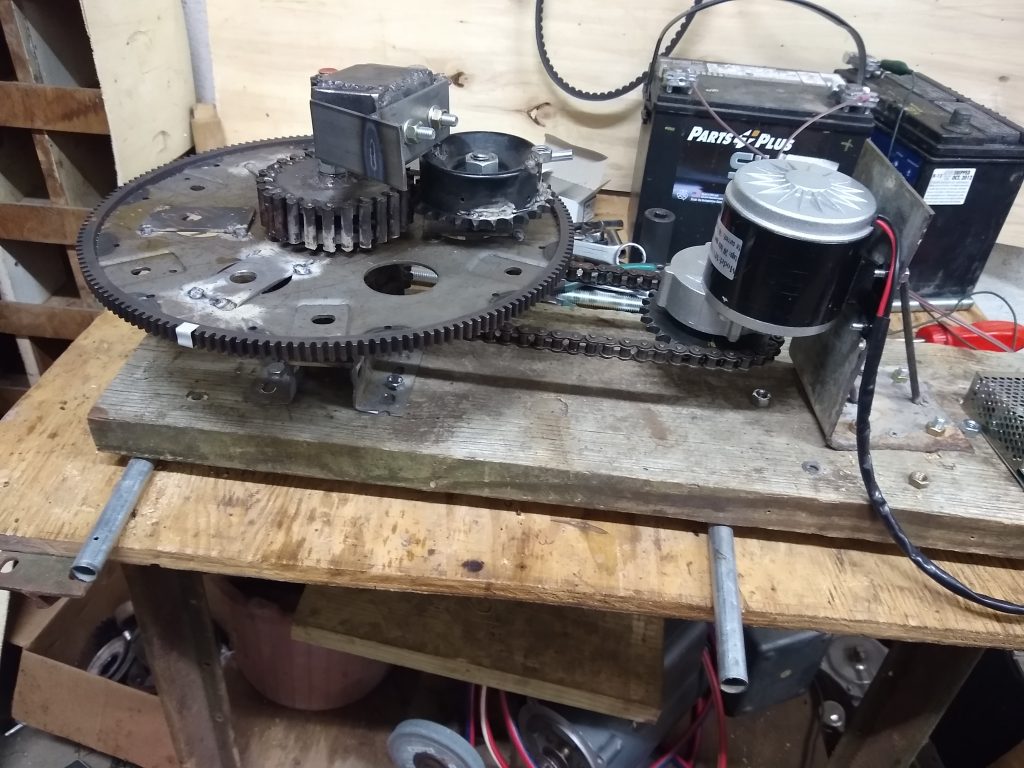
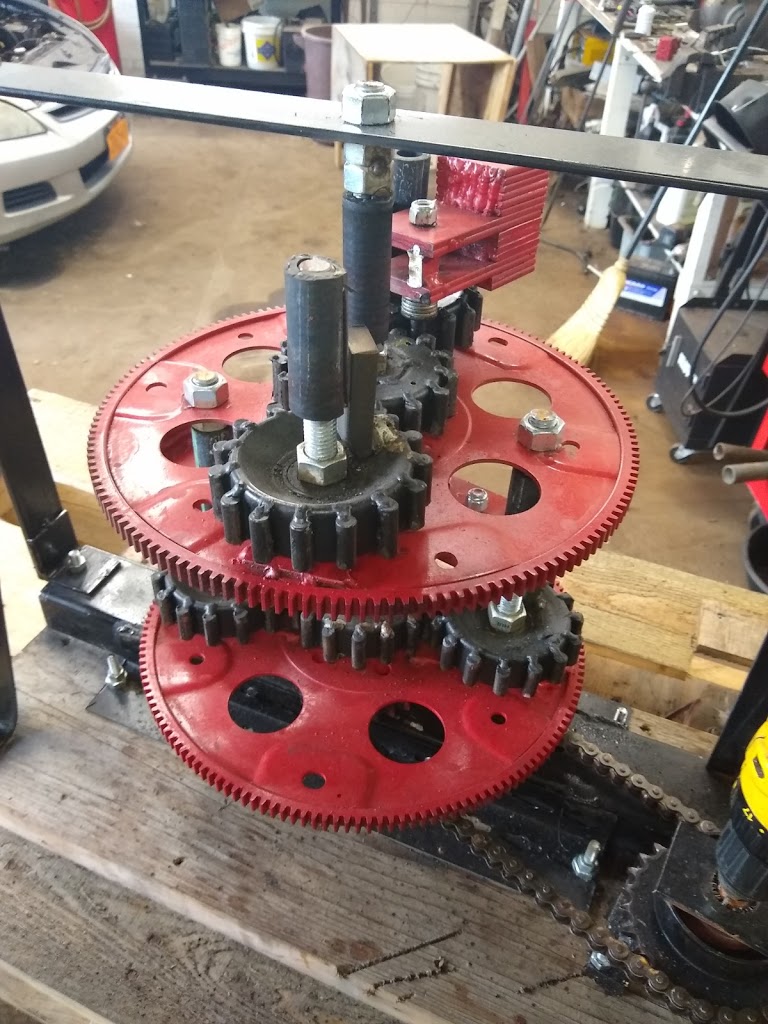
Because the PIE 2.0 was shelved without any disassembly and was kept in-tact from its last tests and demos, I decided it would be interesting to install the 24-volt electric motor and speed controller on it. It was really great to see the PIE 2.0 spring to life with a renewed vigor thanks to the powerful motor. But this was not the reason for upgrading the version number…
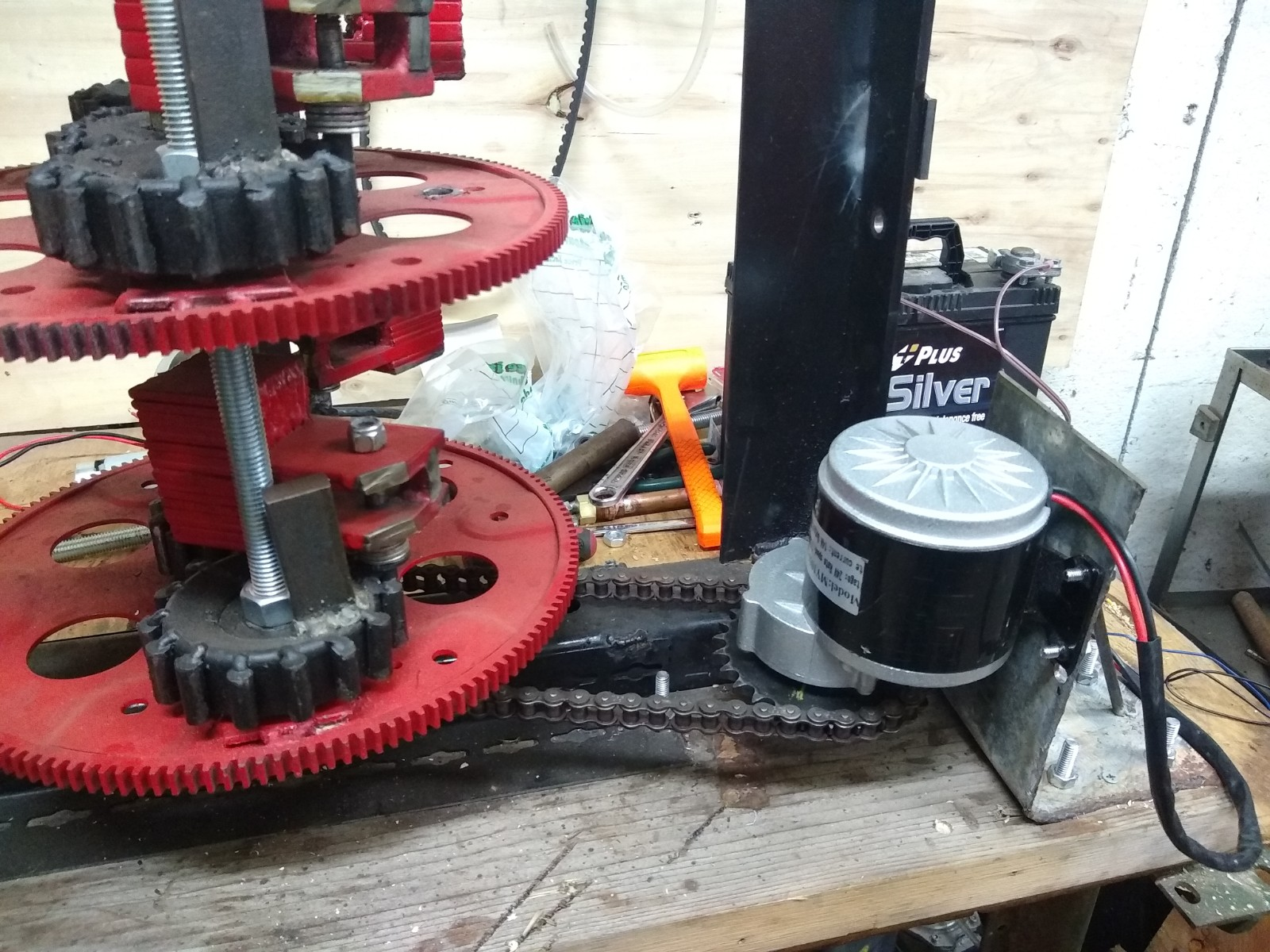
Since the motor and speed controller was working so well (on 12v) it seemed natural to add the speed differential control (SDC) to it as well. I started with one actuator, so the PIE would get a speed boost for one half of the rotation which uses two weight pulses per revolution. This would tell me immediately several things. It would indicate if the SDC would be effective on another PIE (repeatability test) and if it would still work with an opposing weight approaching and entering the “neutral/reset” position.
Both results were 100% conclusive that the result was a definite increase in power output!
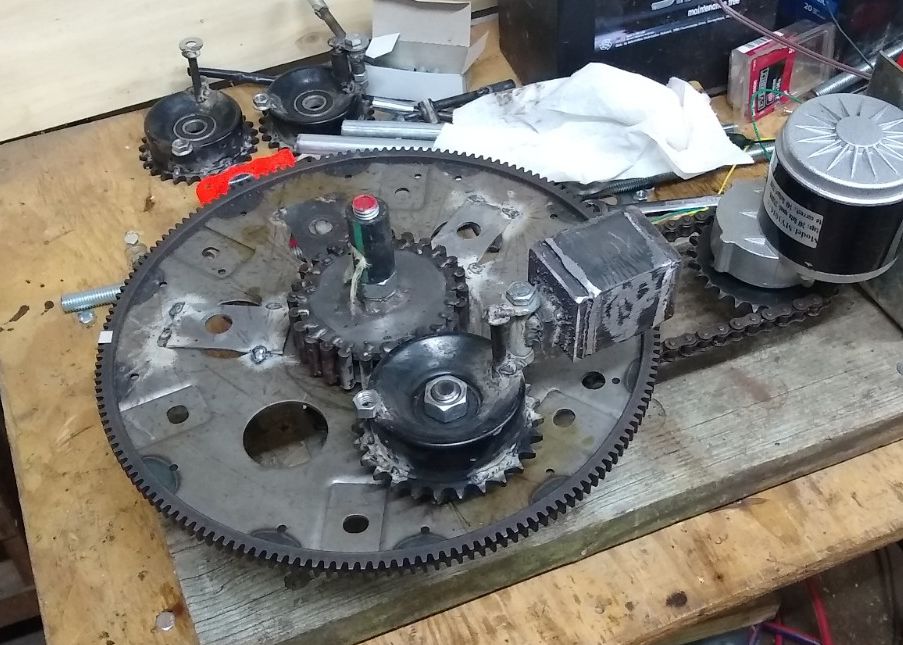
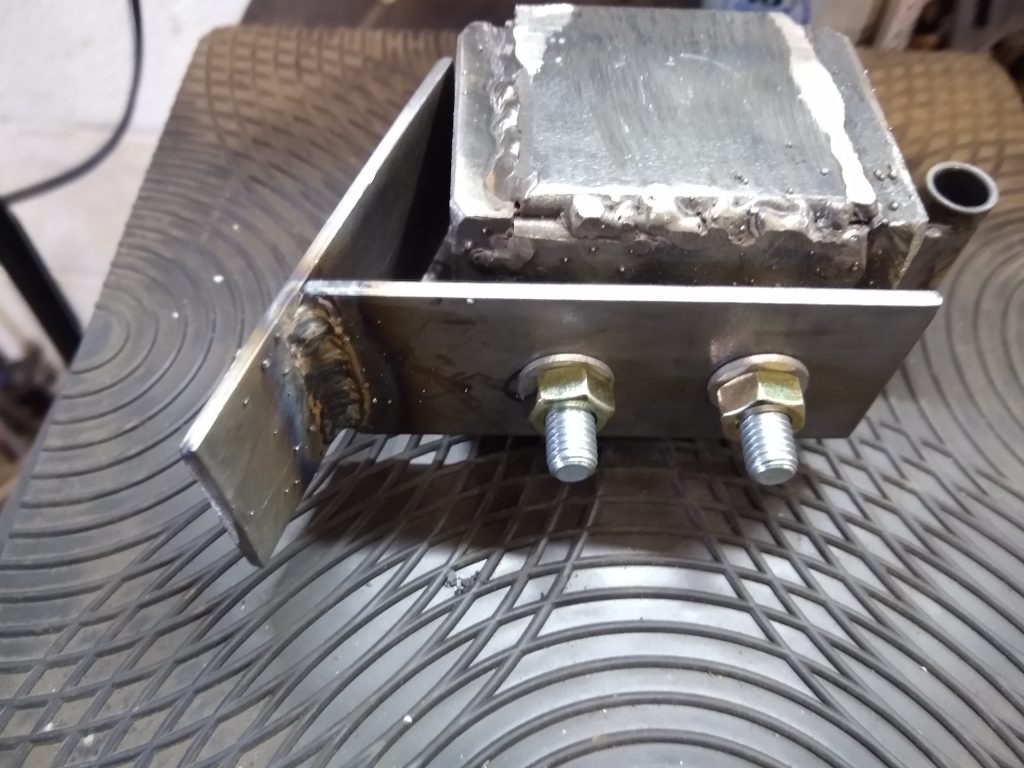
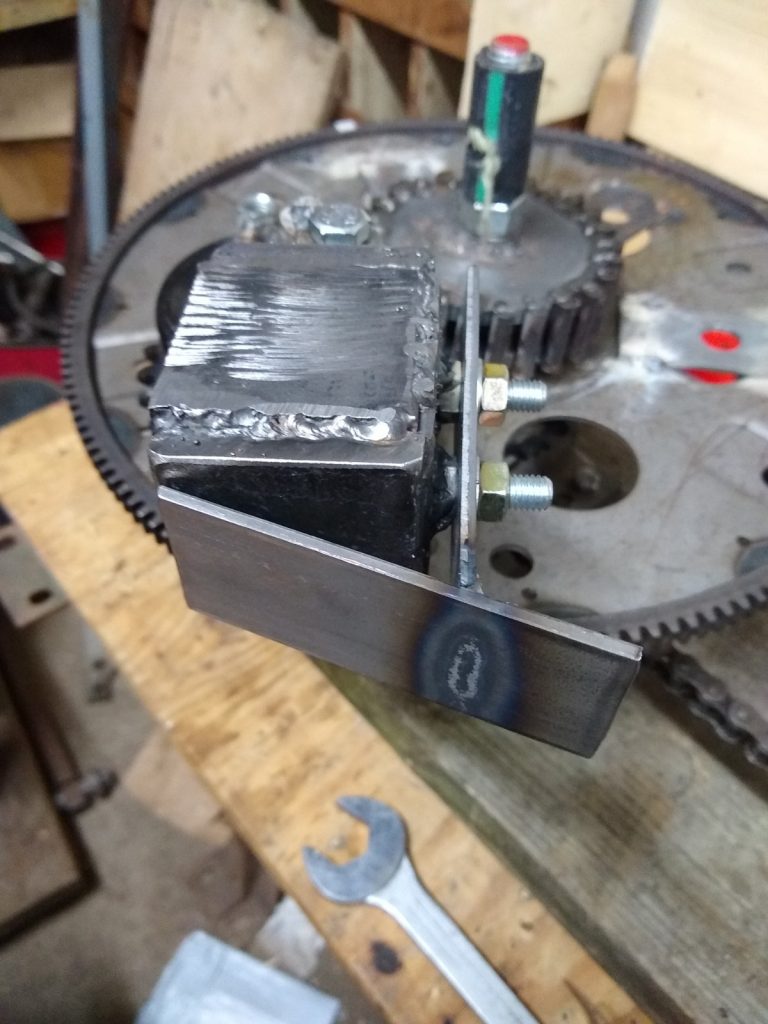
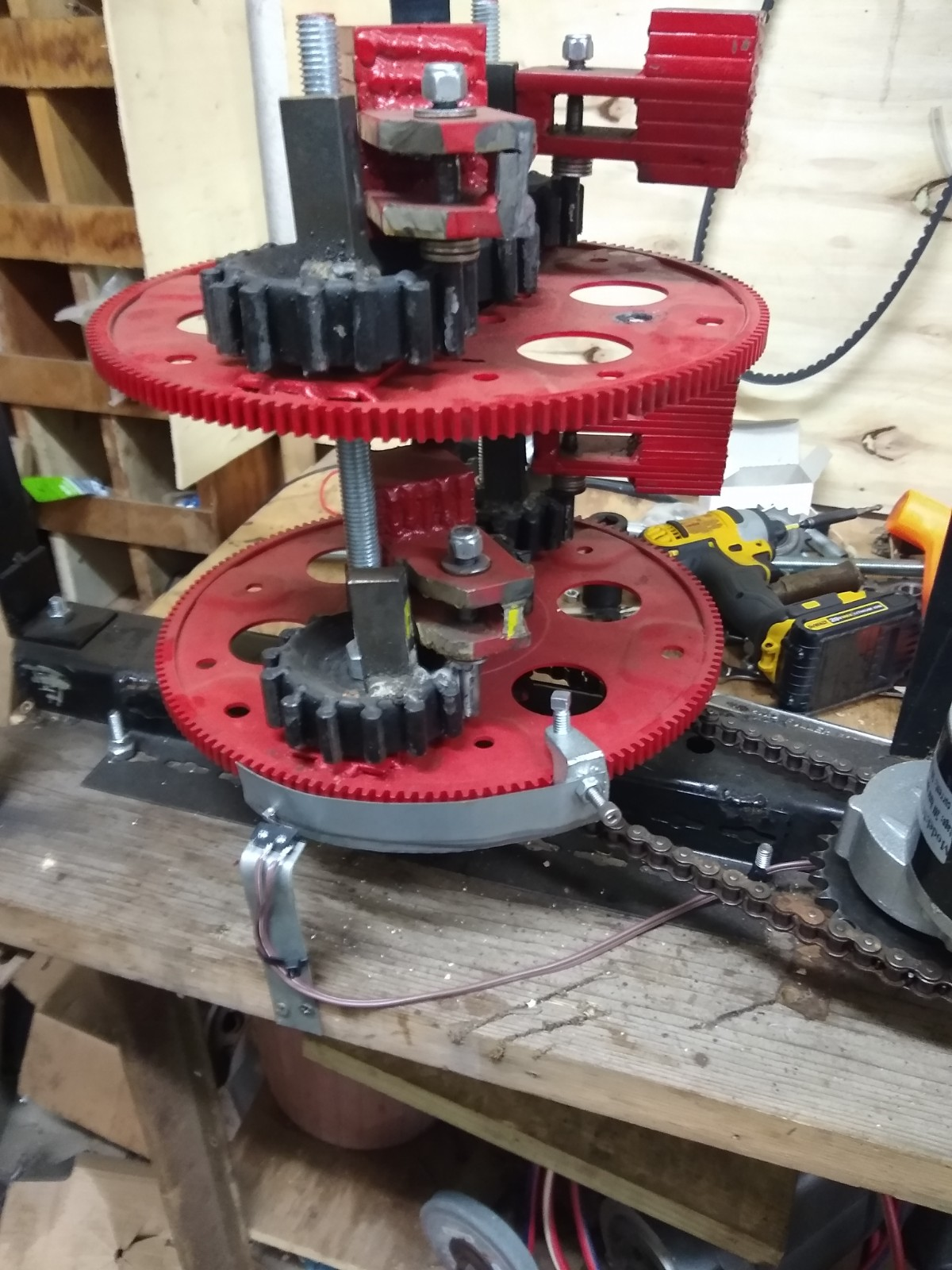
Next was to add a second actuator so the boost would be working with each half of the rotation. A second actuator of identical length (8 inches long) was installed 180 degrees away from the first actuator. Power output seemed very high but because I don’t have a force meter, I simply was not certain. The simple answer was to add a toggle switch in line with the SDC circuit to simply turn the SDC on or off while running the PIE.
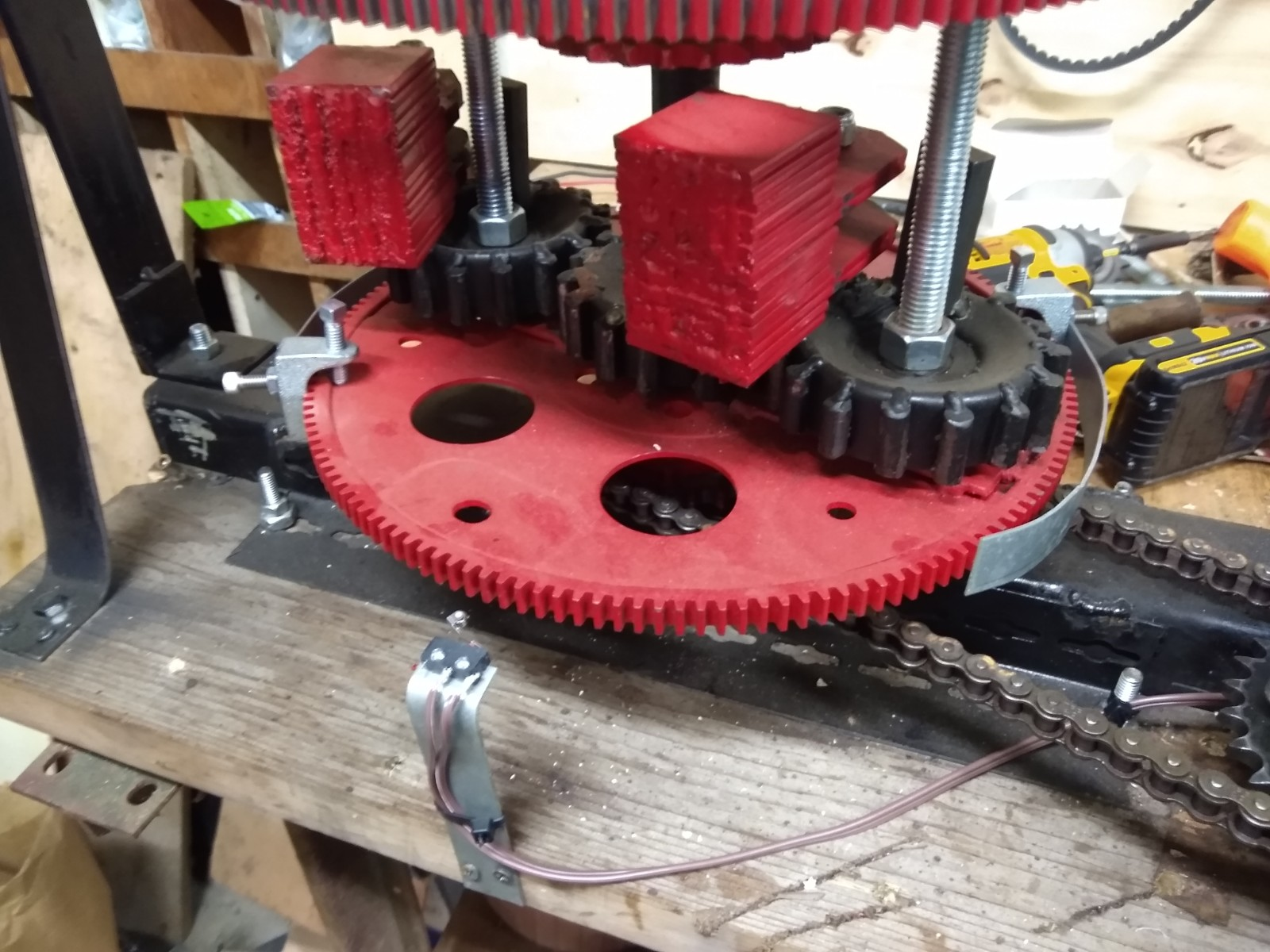
Results of the dual actuator test was amazing! The base speed could be run from 0 to over 100 RPMs, and the action was the same as it was when running on the drill motor. At different speeds ranging from approximately 30 to 100 RPMs, the differential circuit was activated and deactivated at many different base speeds with very powerful results. Judging only by the amount the PIE was moving the bench I would estimate an approximate 50-75% power increase with the SDC active! THIS is the reason I am calling for the version increase from 2.0 to 2.1 on the older PIE.
As a side-note, the PIE 2.1 runs “smoother” with the SDC, and will probably last longer too!
It is now time to “ramp up” the experimental PIE 4.7 with a second weight, and maybe increasing the mass of the weight(s) to around 2kg. In order to do this mass increase, each weight will be using slightly more than 16 linear inches of 3/8”X2” steel along with the BBs, bushing, bolts and weight mounted guide.

As the PIE becomes more “refined”, the total monetary cost of each build increases along with the increase in output power, but when overall quality increases the cost will invariably increase as well.
Videos of the PIE 2.0 changing into a version 2.1 are available on my YouTube channel now, and will also be on BitChute very soon.