3/10/2023
Whew… It has been a really busy 4 months since I posted here! So here is a “snapshot update” of the highlights followed by videos.
- Nov. 2022: The PIE 5.0 works. No where near as well as I wanted, but one more time I learned sooo much that I call it a win!
- Dec. 2022: I took what I learned and applied it to the Trammel engine.
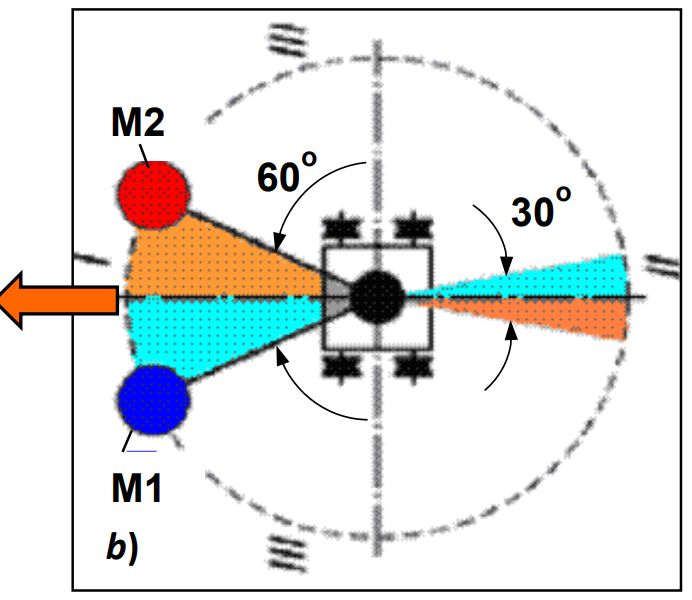
- Dec. 2022: The AMP, or “Active Mass Point”, design is put into service. “Game changer”!!!
- Jan. 2023: New years day, the Trammel displays repeatable “proof of principal” thrust!
- Feb. 2023: Partial overhaul of the Trammel. Several weak points proved where many of the mechanical stresses are and where they are not.
- Feb. 2023: Built a new balance beam with a 20:1 ratio. The Trammel again displays repeatable thrust.
- Mar. 2023: The special ordered brushless motor gives out & looses so much power it is affecting thrust output.
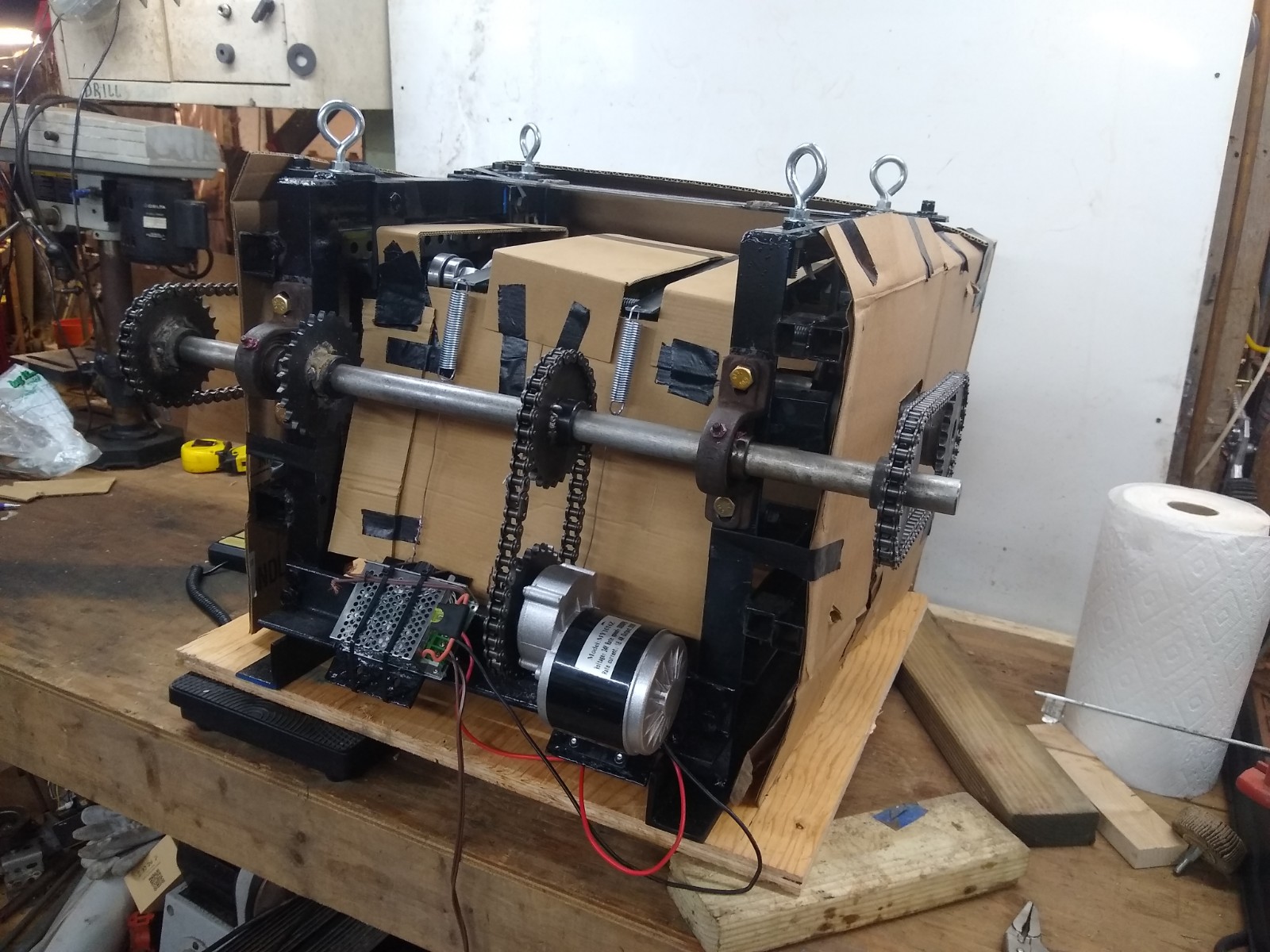
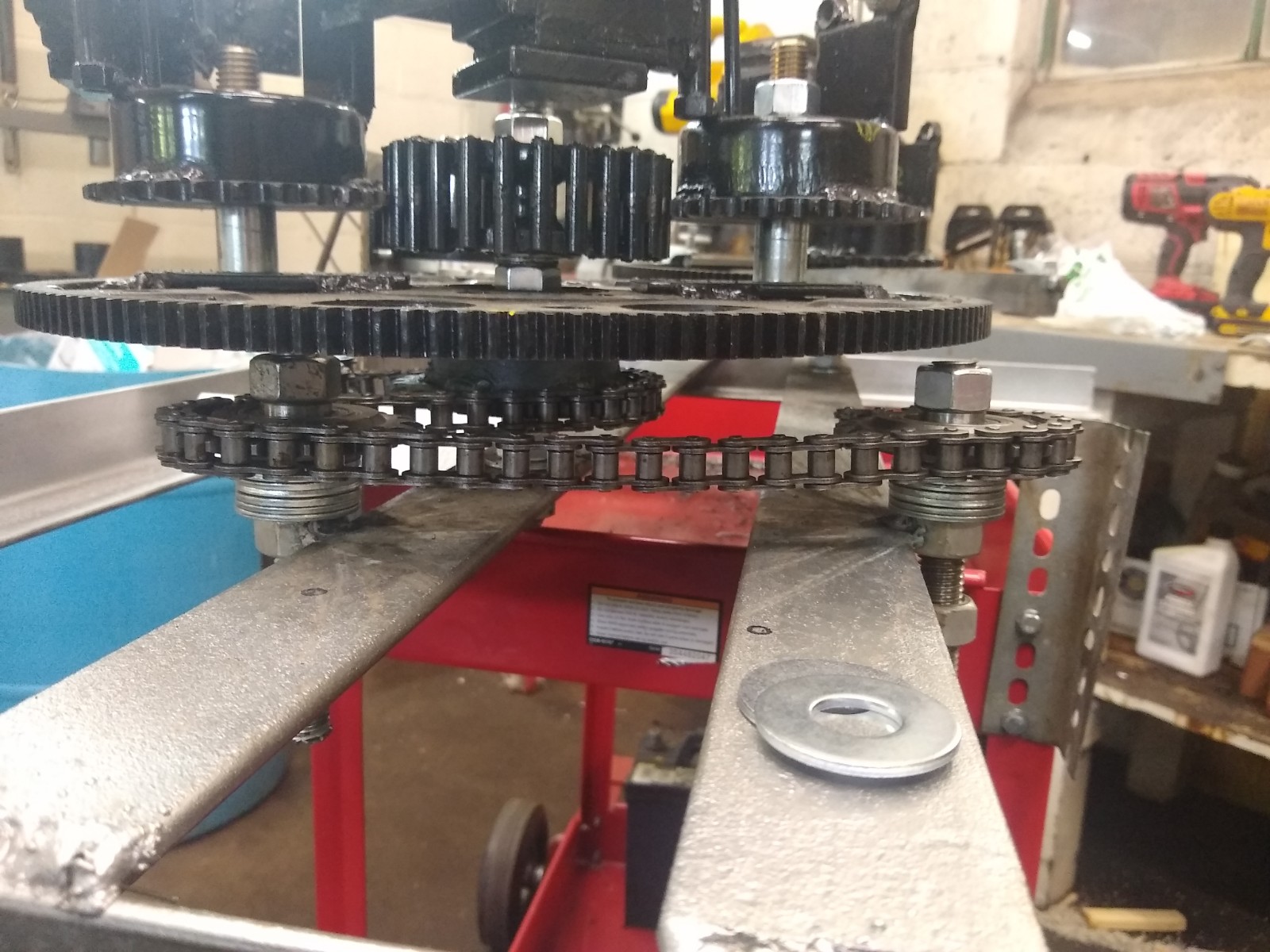
- Mar. 2023: Revamped the motor drive and installed 2 identical 24 volt motors with a 1:2 overdrive gear ratio.
- Mar. 2023: Theory of “mass displacement” is better understood.
Like I said, I have been busy! Here are some of these highlights on my YouTube channel and mirrored on my Bit Chute channel.
So next up will be back to the balance beam and we will be making adjustments to improve thrust. In the near future, an improved build is on the docket using everything learned thus far including improved versions of the highly successful AMP design.
I can easily speculate that the Trammel Engine will become more compact but much stronger within a protective enclosure that will also reduce the noise level dramatically.
Stay tuned for more!